Title
Vulnerable Road Users Safety using a hybrid Cloud RAN and Edge Computing model
Organization
National and Kapodistrian University of Athens
Experiment description
The main concept of VRU-Safe is related to the Safety of the Vulnerable Road Users, and the intelligent and effective prediction and avoidance of such accidents using technologies and concepts, which will be included in the 5th Generation Mobile System (5G), such as Edge Computing, Network Function Virtualization (NFV) and Cloud RAN. VRU-Safe’s primary objective is the experimental evaluation of a network service with computing and networking capabilities, which is able to operate in a distributed manner utilizing either MEC, or Cloud capabilities (in the form of virtualized network functions), depending on the location and the network information of the involved OBUs and VRUs.
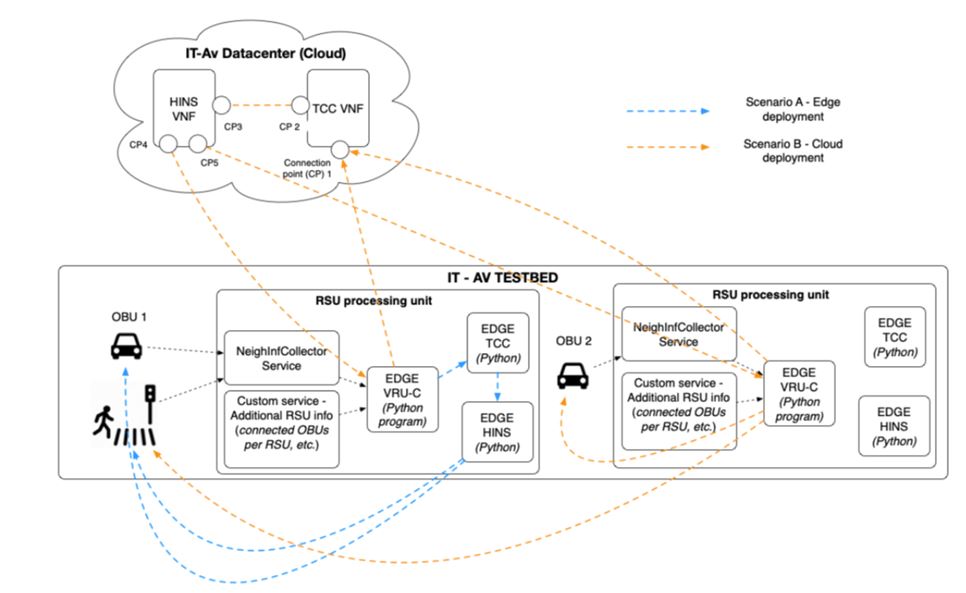
Figure 1 VRU-safe concept
The proposed mechanism, -which operates both at the Edge, as well as on the Cloud,- is capable of identifying Connected Vehicles and VRUs in potentially dangerous situations based on several contexts (Vehicle & VRU position, movement direction, accelerations, road network, etc.), by predicting their trajectories and forwarding the respective notifications to the involved entities (Vehicle & VRU) in order to avoid a potential accident. VRU-safe shall be evaluated in the context of the ITAv testbed, exploiting the testbed’s infrastructure.
The goal of the VRU-safe experiment is the evaluation of a Vulnerable Road User Safety framework, which comprises different computing and decision-making components. These components are responsible for processing context information related to the OBUs of the vehicles, as well as the VRUs (pedestrians, etc.). The VRU experiment makes use of the IT-Av Automotive Testbed and the Network Function Virtualization Infrastructure (NFVI) deployed at the IT-Av datacenter.
The main computing requirements of the VRU-Safe application relate to the location and trajectories’ prediction of the VRUs and the Vehicles, in order to identify and predict potential imminent collisions. By the time such an event is identified, a notification system forwards the respective alerts both to the VRU, as well as the OBU system. The primary components of the framework are a Trajectory Computing Component (TCC), a Hazard Identification and Notification Service (HINS) and a VRU-Safe Controller (VRU-C).
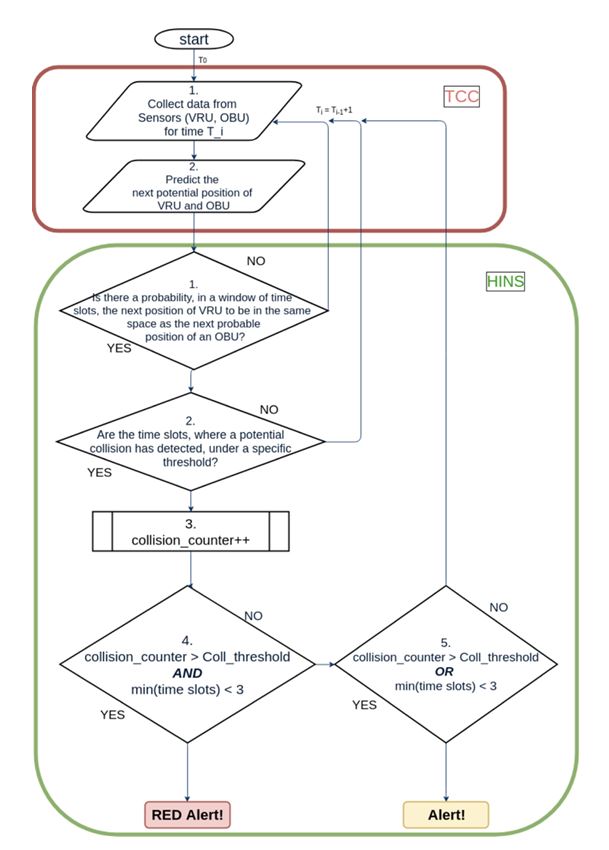
Figure 2 The VRU-safe basic algorithmic logic
The Trajectory Computing Component has been implemented based on an analytical method, along with an array construction methodology, and will be presented in detail in the following sections. Indicatively, the TCC receives contextual information available in the IT-Av testbed related to the speed of the OBUs/VRUs, their direction, along with additional available location/sensor information and predicts their trajectory paths for a future (configurable) time frame, e.g., for the next 20 seconds.
HINS is the component, responsible for evaluating the generated trajectories, and “deciding” whether a situation should be considered as dangerous or not, generating thus the respective notifications to be sent to the OBU and VRU. The flexible design and implementation of HINS provides the option to define different thresholds for diverse scenarios –depending on their severity and/or imminence-, improving the evaluation of the deployed algorithm.
Experimentation & Results
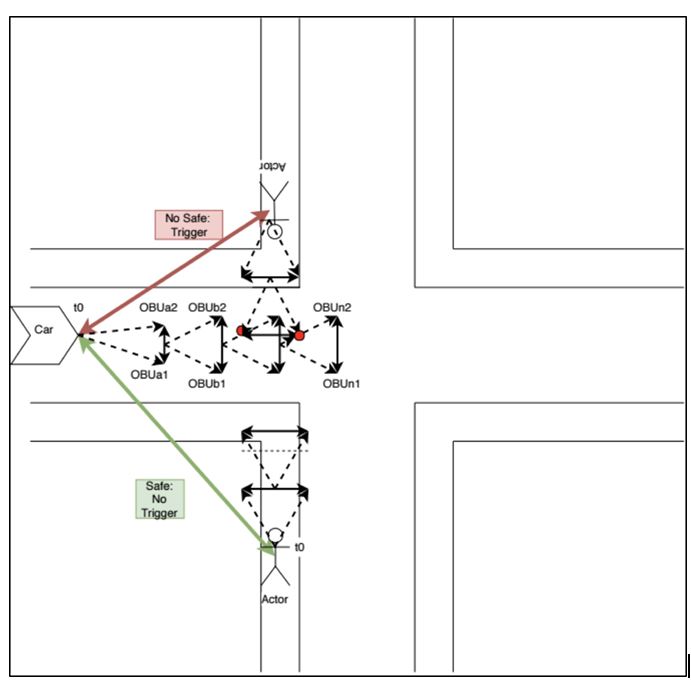
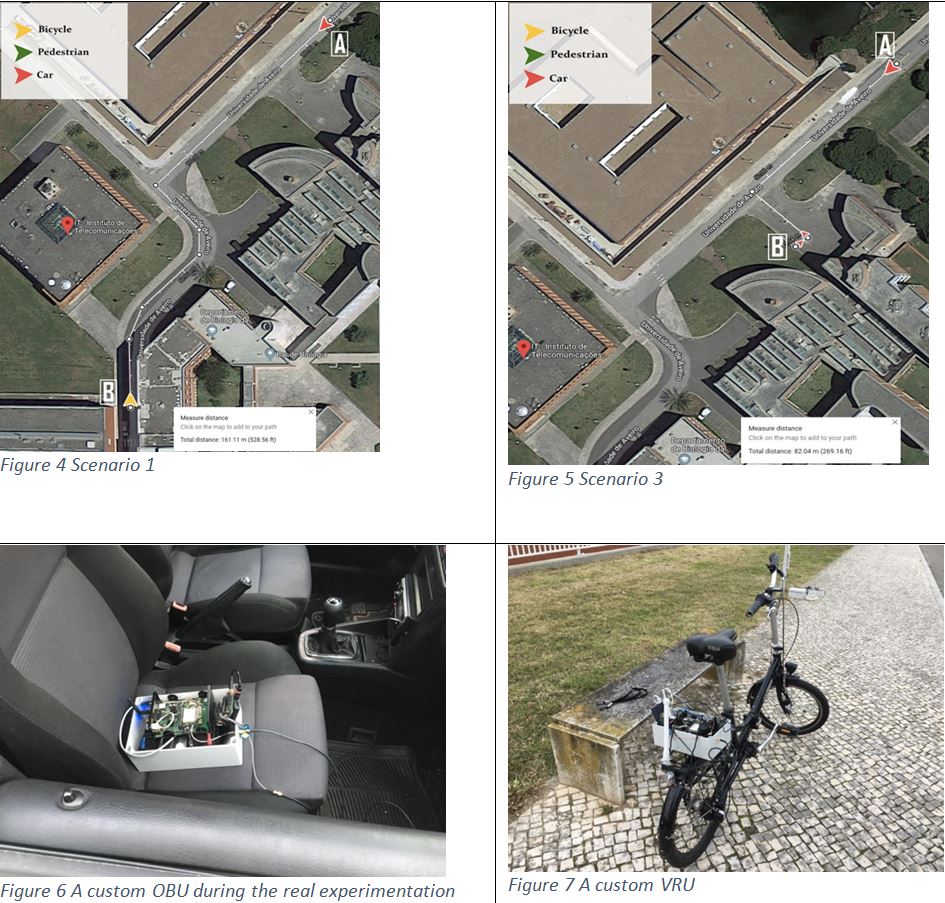
An extended experimentation took place towards the evaluation of VRU-safe in the 5GINFIRE system; 3 rounds of experiments were carried out: the two first involved real-life mobility scenarios by human-operated connected vehicles in the IT-AV testbed in real-time. The NKUA team designed, along with the IT-AV testbed team, the scenarios, which could be carried out: the scenarios involved OBU nodes, installed on a bicycle, as well as a vehicle, both of which were moving in the vicinity of the IT-AV automotive environment and buildings in the Aveiro campus. Four different real-life mobility scenarios took place for Round 1 and 2, which attempt to cover different mobility and networking possibilities towards a holistic evaluation of the system. All the live experiments took place in the IT-AV automotive testbed, in collaboration with the IT-AV team via Skype for real communication during the scenarios’ executions.
In the images, the upper figures show two of the main mobility scenarios in the IT-AV testbed. The bottom two images illustrate snapshots of the custom deployment of the OBUs.
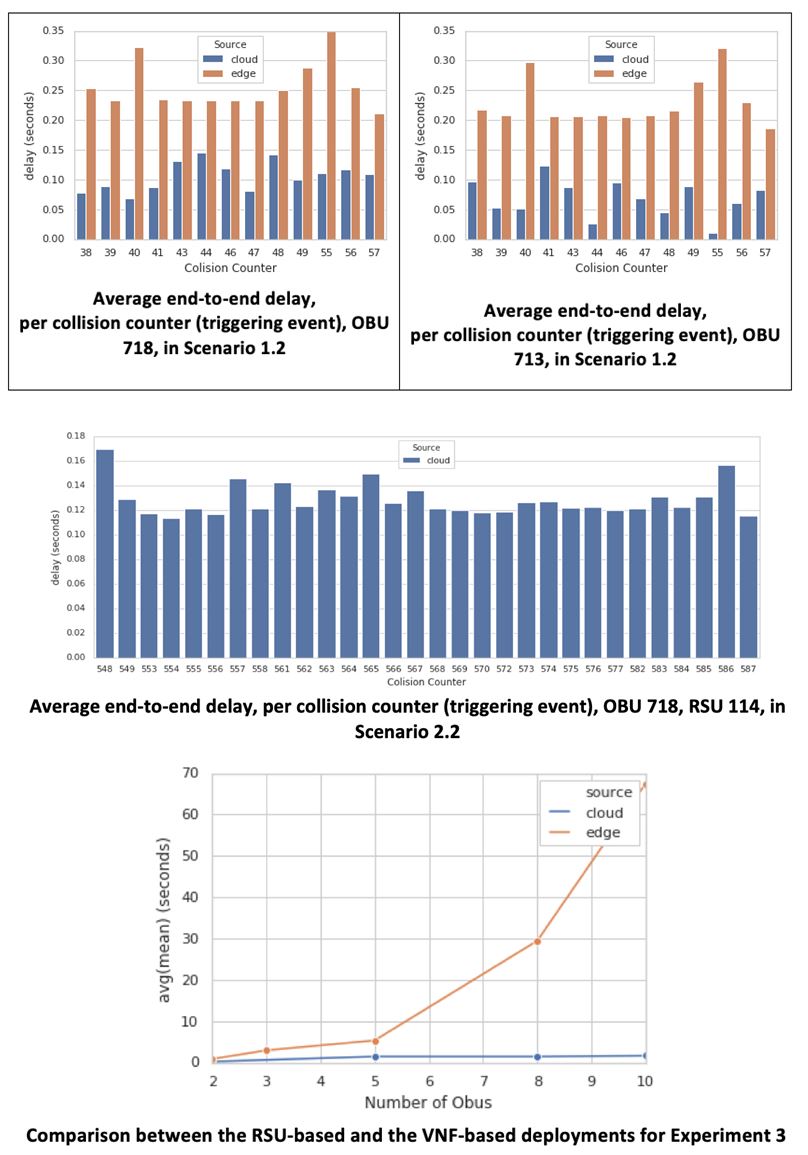
The evaluation of VRU-safe system focused on the evaluation of the end-to-end delay, i.e. the overall time overhead that is introduced from the moment a portion of context information regarding a dangerous event is forwarded from the OBU towards the network, until the moment the alert notification is received back at the OBU from the VRU-safe system. The figures, which follow some representative results:
Conclusions and discussion
The experiments showcased both the MEC-based VRU-safe system’s, as well as the cloud/VNF-based system’s performances, in terms of end-to-end delay measurements, number of collision events detected, as well as system reliability.
In the vast majority of the scenarios, both systems always correctly identified the potential hazardous situations and forwarded the respective notifications to the VRUs and OBUs. In general, we can claim that the cloud-based system outperforms the RSU-based deployment, in the vast majority of the scenarios. However, both systems exhibit end-to-end delays, which are considered to fully satisfy the requirements of such an V2X application, due to the fact that the ultimate goal is to timely notify a user’s (VRU’s) mobile application, several seconds before the actual potential collision.
With regard to the scalability of the system, the performance results show that the VNF-based deployment performs in a highly stable manner, when compared to the RSU-based system, particularly for 5 or more OBUs.
All in all, the experimentation generated valuable insights with regard to the actual implementation requirements for such a VRU protection system. One of the primary conclusions is that, such as a system is able to provide very accurate and timely predictions of potential hazardous events between VRUs and OBUs and take advantage of the distributed nature of the VRU-safe system operation. The second most important conclusion is that the hardware resources are crucial for the MEC deployment, as the -much more powerful, in terms of computing resources- VNF-based system responded in the majority of the cases, with significantly lower end-to-end delays. For that reason, one of the next steps for the VRU-safe project would be, to be evaluated in additional scenarios in the future, with enhanced MEC computing resources, as well as a higher number of co-existing OBUs, in order to demonstrate the system’s validity and viability in a more realistic environment.